
Guss 4.0 – Dank Cyber-Physical Systems zum vollautomatischen Entgratungs- und Verputzprozess
Gemeinsam mit dem Unternehmen Christenguss AG hat die Hochschule für Technik FHNW einen Prozess zum automatisierten Entgraten und Putzen von Gussteilen bei Kleinserien vereinfacht.
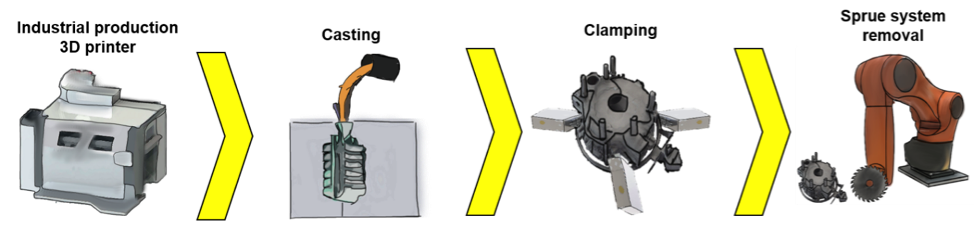
Abb. 1: Der Prozess zur Herstellung von Gussteilen
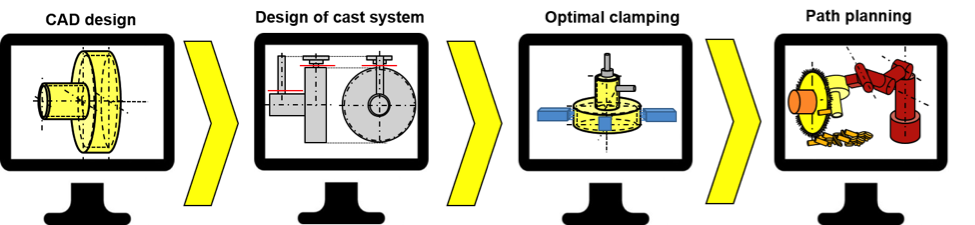
Abb. 2: Der Prozess zur Herstellung der digitale Zwilling
Industrielle Automation, digitales Giessen, Cyber-Physical Systems
Der Prozess des automatisierten Entgratens und Putzens von Gussteilen bei Kleinserien wird unter Anwendung der Robotik so vereinfacht, dass das Personal zum Einrichten nur ein Mindestwissen auf dem Gebiet der Robotik benötigt.
Zuerst wird der digitale Entwurf des Gussstücks und danach die Sandgussform für den Rohling mit einem 3D-Sandformdrucker erstellt. Der Mitarbeiter startet nach dem Giessen den Entgratungsprozess auf Basis der Daten, welche mit Hilfe des digitalen Zwillings berechnet wurden. Während dieses Prozesses werden die kleinen Positionsfehler aufgezeichnet und in situ kompensiert. Das Angusssystem wird anschliessend robotergestützt vom Gussstück abgetrennt und entfernt, der Rohling steht für die weitere Verwendung bereit.
Um einen optimalen Greifvorgang des Gussteils und eine optimale Roboterpfadplanung zu erreichen, wird das Konzept des digitalen Zwillings verwendet. Das geometrische Grundmodell des cyber-physischen Systems basiert auf Daten des 3D-Sandformdruckers. Diese enthalten die Geometrie des geplanten Rohlings sowie jene der Angussteile. Sie bilden die Grundlage für die digitale Optimierung des Greifprozesses und der Roboterpfadplanung. Zum Greifen des Gussteils werden drei oder mehr Universalklemmsysteme verwendet. Diese Hardware-Klemmsysteme ermöglichen stabile, reibschlüssige Verbindungen. Mit einem mathematischen Modell wird die Klemmung optimal berechnet. Für die Pfadplanung werden durch eine Kombination der 3D-Daten des Guss- und des Angusssystems Schnittebenen generiert. Daraus wird automatisch die Bahnplanung erstellt, welche die Positionen der Universalklemmsysteme berücksichtigt und sicherstellt, dass bei der Entgratung das Gussteil oder die Peripheriegeräte (Klemmtisch, Roboter usw.) nicht beschädigt werden.
Auftraggeber | |
Ausführung | |
Dauer | 3 Jahre |
Förderung | |
Projektteam | Prof. Dr. Roland Anderegg (Leitung), Max Edelmann und Matthias Füglister, Wiss. Forschungsassistenten |