Motion Tracking mit Webcams [DA]
| Titel: | Motion Tracking mit Webcams |
| Projektart: | Diplomarbeit |
| Studenten: | Stephan Graf, Sascha Hofer, Martin Schindler |
| Dozent: | Marcus Hudritsch |
| Auftraggeber: | FHBB, Abt. Informatik |
| Experte: | Dr. Peter Fornaro |
| Projektdauer: | 20.10.2004 – 23.12.2004 |
| Kontakt: | marcus.hudritsch@fhnw.ch |
Abstract:
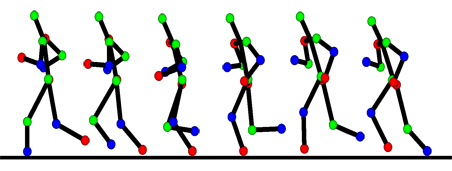
Das digitale Erkennen und Erfassen von Bewegung im Raum gehört sicherlich zu den faszinierendsten Gebieten der Informatik. Mitunter gehört es aber auch zu den komplexeren Problemen.
Die Diplomarbeit Motion Tracking mit Webcams wurde von Herrn Hudritsch, Dozent an der Fachhochschule beider Basel, im Anschluss an die gleichnamige Projektarbeit initiiert. Die grundsätzliche Machbarkeit eines Motiontrackings auf der Basis von Webcams wurde im Rahmen der Projektarbeit erwiesen und in einer ersten Form umgesetzt. Zu Beginn der Diplomarbeit wurde als Ziel vereinbart, die Benutzeroberfläche der vorangegangenen Projektarbeit als Client-Server Architektur umzusetzen, welche unabhängig von der Anzahl Kameras sein soll. Ein weiterer Punkt war die weitgehende Automatisierung der Kalibrierung.
Die Diplomarbeit zeichnete sich durch ein breites Spektrum an verwendeten Technologien, wie COM, DirectShow unter .NET, C++, C-Sharp und Multithreading aus. Aber auch Fachwissen in Elektronik und handwerkliches Geschick sowie die praktische Umsetzung der Kenntnisse in Bildverarbeitung und verteilten Anwendung waren gefragt. Im Rahmen einer weiterführenden Arbeit könnte eine Umsetzung der 3D-Daten in einem Robotersystem, 3D-Animationssoftware oder Spieleanwendung ein Thema sein.
Ergebnisse:
- Die Diplomvorgaben konnten erfolgreich erreicht werden
- Die Kalibrierung wurde weitgehend automatisiert
- Eine Client-Server Applikation, in welcher die Bauteile der Projektarbeit integriert wurden, wurde erfolgreich erstellt
- Remote Control wichtiger Funktionen des Clients über den Server wurden umgesetzt
- Eine Übertragung von 2D-Daten aus DirectShow in die Applikation funktioniert einwandfrei
- Speicherformate für 2D- und 3D Daten wurden intern definiert
- Gespeicherte Videos können problemlos in die Client-Applikation geladen und verarbeitet werden
- Der 3D Tracker wurde angepasst und optimiert
- Die Assoztiation FP zu BP wurde mittels Standardschemas, welche abhängig von der Kameraperspektive sind, automatisiert
- Es ist gelungen, ein Realtime Tracking System zu entwickeln und die benötigten Komponenten zu implementieren und erfolgreiche Tests durchzuführen.
Ausblick:
- Im Rahmen einer weiterführenden Arbeit könnte eine Umsetzung der 3D-Daten in einem Robotersystem, 3D-Animationssoftware oder Spieleanwendung ein Thema sein. Damit dies möglich ist, müssen die 3D-Daten in ein bekanntes 3D-Speicherformat umgewandelt werden.
- Diese Diplomarbeit befasst sich mit dem Verfolgen kontrastreicher Punkte. Mit einer Erweiterung des Trackers könnten auch allgemeine Formen oder Objekte verfolgt und dargestellt werden.
- Die Realisierung eines Trackings mit stereoskopischer Anordnung der Kameras wäre ein denkbarer Ansatz, um z.B. einem Roboter die Fähigkeit zu geben, sein Umfeld dreidimensional zu erfassen und sich so zu orientieren.
- Entwickeln einer Featurepointextraktion, die auch unter allgemeinen Umgebungsbedingungen zuverlässig funktioniert. Denkbar wäre auch eine Erweiterung, die es ermöglichen würde eine ganze Szenerie dreidimensional zu erfassen und darzustellen.
- Alternative Methoden der Kalibrierung erarbeiten, welche z.B. ohne aufwändige, sperrige Hardware (Würfel) realisiert werden kann.