Image Processing in Pipe Inspection I
Robotergestützt Kanalinspektion
KTI-Projekt: 7785.2 ESPP-ES (2006-2007)
Hintergrund
Der Unterhalt von Rohrleitungsnetzen ist für Gemeinden und Städte eine sehr kostspielige Aufgabe. Aus finanziellen und verkehrstechnischen Gründen muss eine Leitungssanierung sehr gut vorbereitet sein. In diesem Bereich erhält die Inspektion mit fahrenden Kanalrobotern und die Auswertung der dadurch angefallenen Videobilder eine immer wichtigere Rolle. Die rasante Entwicklung der Computer-Hardware ermöglicht seit kurzem, nicht nur die digitale Komprimierung der Videodaten, sondern auch die gleichzeitige Verarbeitung der Bildinformationen.
Auf einem Kanalroboter befindet sich eine PAL-Videokamera mit einer Fischaugoptik. Die Röhreninspektions-Software der Firma CDLab AG, Murten, verwendet digitalisierte PAL-Videodaten und extrahiert daraus in regelmässigen Abständen ringförmige Bilder von schmalen Rohrabschnitten, welche zu verschieden breiten Streifen transformiert werden, so dass schliesslich durch Aneinanderreihen dieser Streifen eine kontinuierliche Innenwandabwicklung der Röhre entsteht. Im Gegensatz zur analogen Inspektionstechnik erlaubt diese Darstellung einen raschen Überblick über den Leitungszustand eines kompletten Rohrabschnittes und ein Ausmessen von Objekten und Schäden.
Ziele und Ablauf
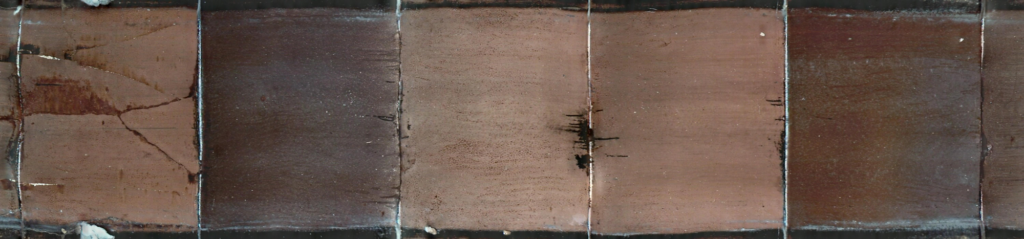
Im ersten Teil des Projektes geht es darum, das Zusammensetzen der aus den Fischaugbildern extrahierten Streifen zu verbessern, um eine optisch einwandfreie Innenwandabwicklung zu schaffen. Dies ist die Voraussetzung für eine automatisierte Auswertung des Zustandes der Röhre. Der Abstand der einzelnen Streifen ist bedingt durch die ungenaue Distanzmessung des Roboters unkonstant. Weil die Streifen immer von derselben Position im Videobild extrahiert werden, der Roboter aber bedingt durch Unebenheiten in der Röhre seine Position zur Röhrenwand ändert, ergibt sich auch daraus ein Fehler. Die bestehende Scansoftware der Firma CDLab reihte diese Streifen bisher 1:1 aneinander ohne diese Fehler zu korrigieren.
Mit der von uns entwickelten Software werden nun diese Fehler auskorrigiert. Da die einzelnen Streifen eine schmale Überlappung haben, kann mit einem Templatematching-Verfahren ein optisches Flussfeld von jedem Streifen zum nächsten berechnet werden. Mit Hilfe dieses Flussfeldes und der berechneten Helligkeitsdifferenz können diese Streifen nahtlos aneinander gereiht werden. Ein erfolgreiches Matching hängt entscheidend vom Auswählen der einzelnen Templates ab. Denn ein kontrastloses Template, wie es z.B. in sauberen PVC-Röhren der Fall ist, ergibt keine eindeutige Zuordnung. Deshalb werden zuerst die Regionen mit dem meisten Kontrast gesucht. Diese Templates sind die Ausgangslage für das Matching. Zu diesen Templates werden dann die Positionen mit dem besten Korrelationskoeffizienten im vorangehenden Streifen gesucht. Aus diesen gefundenen Translationsvektoren lässt sich dann ein optisches Flussfeld für den nachfolgenden Streifen berechnen. Die Helligkeitsunterschiede zwischen den beiden benachbarten Streifen, bedingt durch die unterschiedliche Distanz zur Lichtquelle des Roboters, können nun wegen der genau bekannten Verschiebung ausgeglichen werden. Der nachfolgende Streifen wird dabei subpixelgenau an den vorangegangenen angesetzt.
Die von uns entwickelten Algorithmen haben eine hohe Effizienz, so dass das Zusammensetzen der Bilder noch während der Rückfahrt des Roboters aus der Kanalröhre geschehen kann. Dieser erste Teil des Projektes wurde bereits zur Projekthalbzeit fertig gestellt und in die Software von CDLab integriert. Mehrere Kunden von CDLab zeigten sich sehr erfreut von diesem Fortschritt.
Resultate
Mit Hilfe unserer neu entwickelten Software zur Erkennung von Muffen und Einläufen können auf einem herkömmlichen Personalcomputer (Pentium 4 Prozessor, 3GHz) pro Sekunde ca. 3.5 Meter einer Röhre auf Muffen und Einläufe untersucht werden. Bei Tests von 28 unterschiedlichen Röhrenabschnitten mit einer Gesamtlänge von 860 Metern und insgesamt 667 Muffen, wurden 660 Muffen korrekt erkannt und sieben Strukturen fälschlicherweise als Muffe deklariert. Dies entspricht einer Erkennungsrate von ca. 99%. Die Erkennungsrate von Rohreinläufen liegt momentan noch bei weniger als 70%. Ein Hauptgrund für diesen schlechten Wert liegt im Algorithmus, der nur runde Objekte erkennt, die Rohreinläufe aber bedingt durch deren Anschlusswinkel und Zustand eine andere Form aufweisen. Deshalb wird die Erkennung von Rohreinläufen auch ein Thema im Nachfolgeprojekt sein.
Dieses Projekt wurde in einem zweiten KTI-Projekt weitergeführt.
Mehr Infos dazu finden Sie hier >>
Resultate
Kontaktperson
