Drone: Experiencing the Next Dimension

Our newest addition to the rover is our drone. The main goal of the drone is to take pictures from places the rover can’t get to, such as the top of a volcano or similar places. Furthermore, it must fly completely autonomous, which includes starting and landing from the rover.
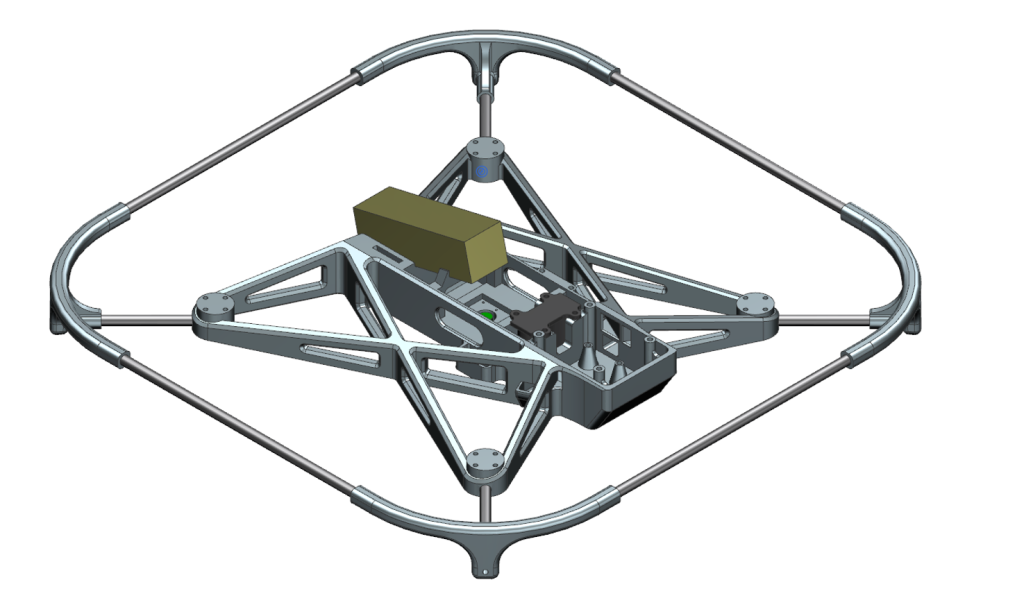
Since it is not allowed to use GPS to determine its location, we’ve chosen a different approach to locate our drone on the mars-yard. We’ve decided to use the AR-tags, which are provided by the organizer of the ERC. AR-tags are typically square-shaped patterns with black borders and encoded data in the form of contrasting black and white cells within the pattern. These tags are designed to be easily recognizable and trackable by computer vision algorithms. To recognize them, our drone is equipped with a camera and an additional computer. This computer calculates the distance and angle at which the drone is standing from the tag. Since the location of the tags are known, we can calculate the absolute position of the drone. To be able to land our drone on the rover, we’ve also added an AR-tag on top of the landing platform. Additional information is provided by a distance sensor on the drone, which is primarily used to assist the drone in its landing process.

As soon as the desired location is reached, a picture is taken, which the drone sends to the rover over a 433 MHz link. The rover sends it over the normal 5 GHz network to our Mission Control Center. With this system, we’ve achieved a minimum of communication with our drone. But for safety reasons, we are still required have a 2.4 GHz link on the drone, which is used by the pilot with a remote, to intervene in an emergency.
A big goal for the future is to make our drone much lighter, to reduce the overall weight of our rover.
Comments
No comment posted about Drone: Experiencing the Next Dimension