Overcoming Technical Hurdles in Developing an Improved Robotic Arm
It has been over a month since the FHNW Rover team received new servos for our improved robotic arm. While we were initially excited to get started, we soon discovered that there were technical hurdles to overcome before we could achieve our first lift.
We were using the same open-source software by Trossen Robotics (https://github.com/interbotix) that we had used for our previous arm, but the driver did not support different series of motors in the same arm. This meant that we had to modify the software ourselves to make everything work properly.
One of the main challenges we faced was getting the different series of motors in the same arm to work together smoothly. This required us to spend significant time tweaking the arm to ensure that it was functioning properly.
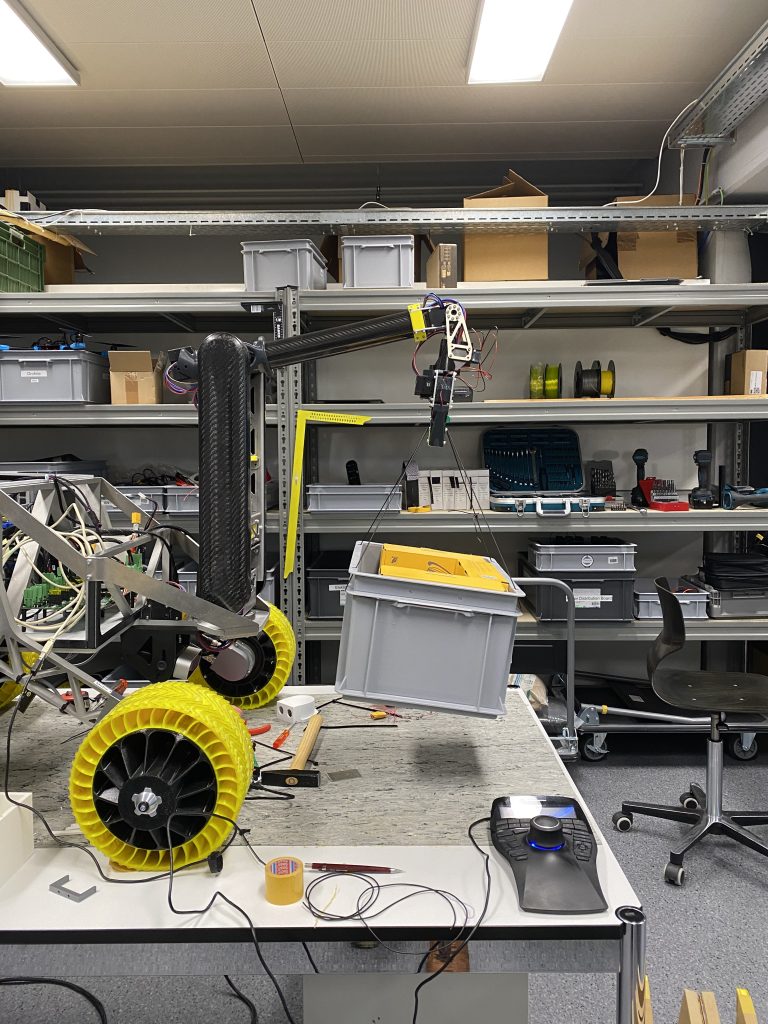
Despite these technical hurdles, we eventually achieved our first lift. However, we recognize that there are still tweaks and small improvements to be made in the development of the robotic arm.
Our first lift accounted for more than five kilograms, albeit not at full reach. This is a solid improvement over last year’s arm, which barely managed to lift a single kilogram.
As we look ahead, we are excited about the possibilities this project presents for our team. While we acknowledge that there is still a long road ahead of us, we remain committed to overcoming any obstacles that we may encounter.
In conclusion, the FHNW Rover team’s experience developing an improved robotic arm has been a journey filled with technical challenges. We received the servos over a month ago, but the majority of our time has been spent getting the software working properly. Integrating different series of motors in the same arm required significant time and attention to detail.
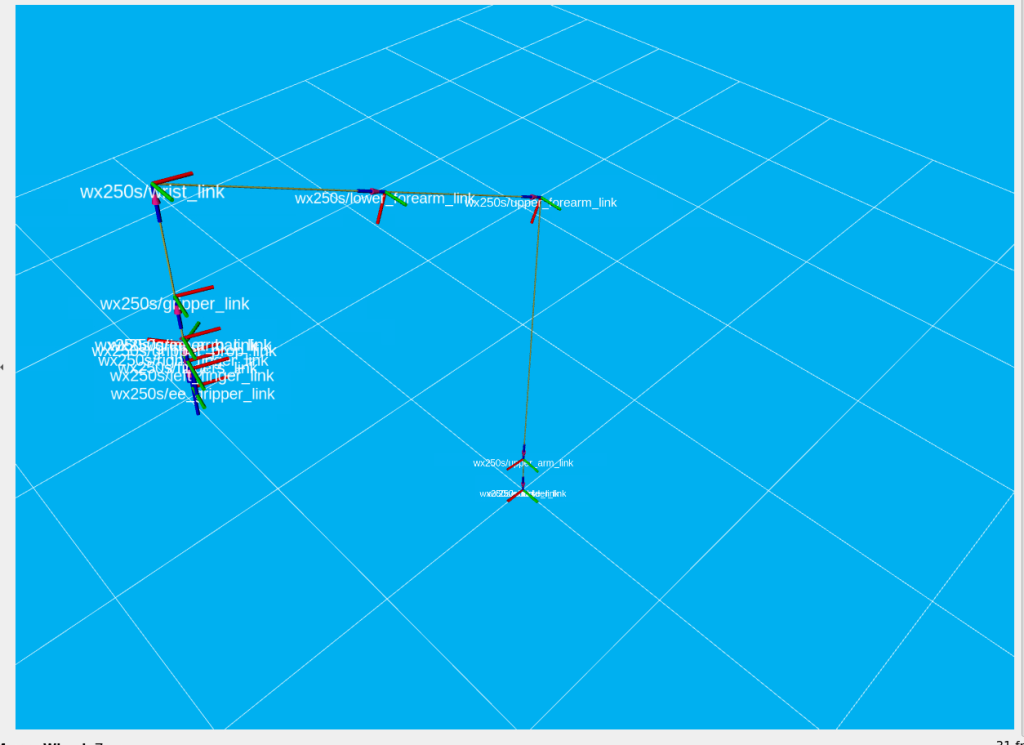
In addition to the physical arm, we also created a wire model digital twin of the arm. This allowed us to simulate and test different configurations and movements before making any changes to the physical arm. This was an important part of our development process, as it allowed us to identify potential issues and make adjustments before implementing changes on the physical arm.
Comments
No comment posted about Overcoming Technical Hurdles in Developing an Improved Robotic Arm