Sun’s out, Guns out
With the nice weather coming down during the easter weekend and the week after, our rover “Meyer 1” has taken it’s first steps outside.
This first test was important to evaluate multiple components on our rover such as the wheels, the suspension, motors and motor control, general sturdiness and communication systems. Following, we want to give you a bit of technical insight into our design considerations.
Wheels
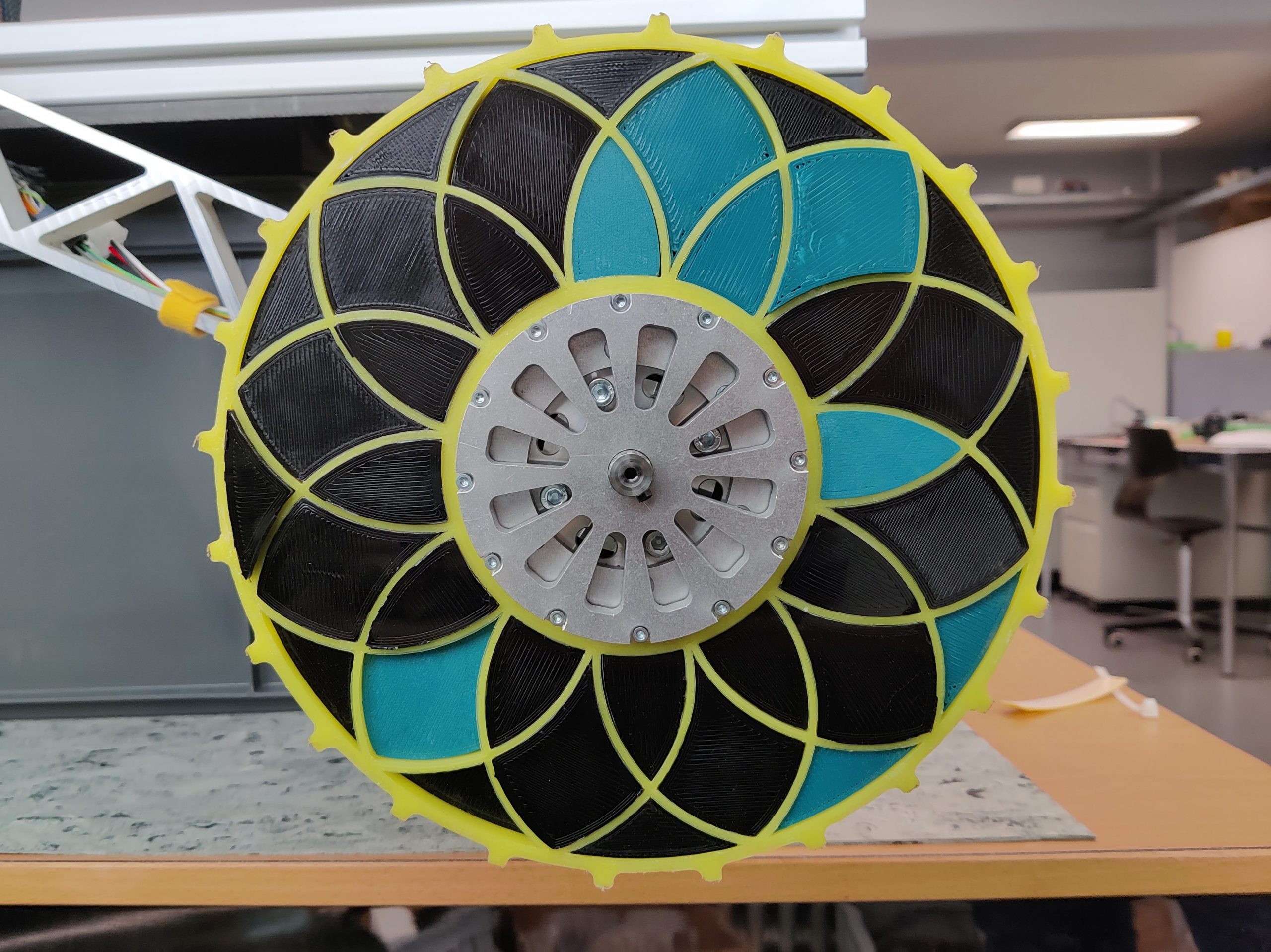
Our wheels currently are currently 3D printed with a flexible filament called TPU. To change the wheel flexibility, elements can be removed or added to the wheels. This is visible in the pic below (blue and black elements). Unfortunately, these elements can become lose because of the 3D printing tolerances and sometimes fall out of the wheels. We still think the design is pretty sick and are looking for ways to improve upon it.
Suspension
As you might know from our previous blog posts, we currently use a rocker suspension, very similar to the rocker-bogie system the NASA rover perseverance uses (the bogie part is because perseverance has 6 wheels and we have 4). With this suspension, the rover can travel over objects while always keeping all wheels on the ground. Don’t get us wrong, this only works with slow speed and is not exactly usable for your new Porsche. Since we are not trying to break a new track record around Silverstone, this suspension is ideal for our use case. you can see it in action in the video below.
Motors and Motor Control
Regarding our motors, the tests have pretty much confirmed what we thought. We have powerful 180 W Maxon Motors built into each wheel, specially equipped with hall sensors. Hall sensors are small magnetic sensors that sense the position of the rotor. With our motor, we have 48 positions per rotation. However, this is only accurate enough to work well when the wheels are turning at a certain speed. Below this speed, the sensors cannot know where between two positions the rotor is and the motors cannot use their entire torque. This is an issue for our rover in low speed scenarios and especially when turning in place. Good news is, the solution is waiting eagerly to be implemented. We will fit encoders, which can sense the rotor position much better, up to 8192 positions per rotation! We have already tested them on a single wheel and the results look promising.
We hope you enjoyed our little insight into the different engineering topics and look forward to give you further updates soon.
Comments
No comment posted about Sun’s out, Guns out